Focus
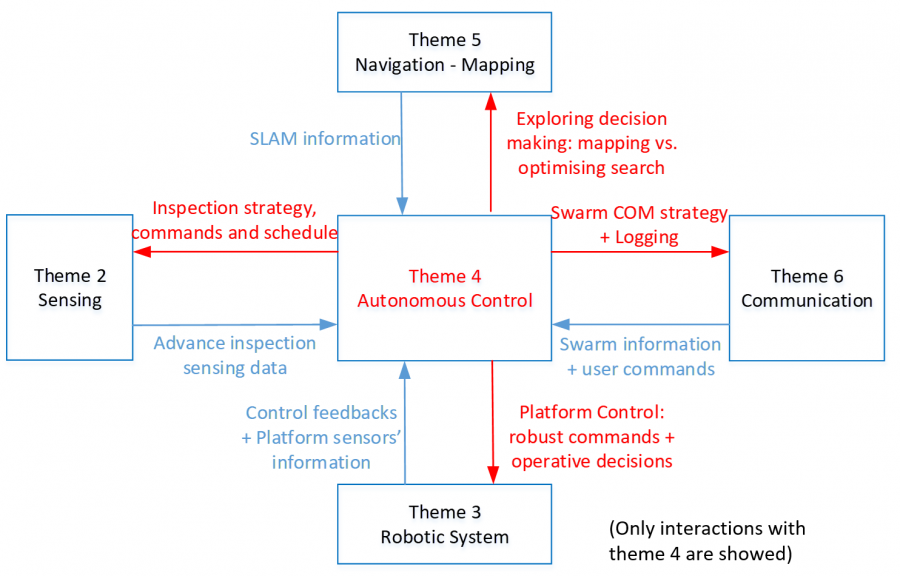
Theme 4 is about the science of adaptive and embodied control (led by Cohen). It will deliver sensorimotor control strategies to allow the miniature robots to operate autonomously, to cooperate and to make decisions in the presence of uncertainties and thus to function effectively in the harsh environment of a buried pipe.
Challenges
The success of this Programme Grant hinges crucially on the autonomous operation of robots in buried pipes. Our aim in this theme is to enable the robot swarm to efficiently and autonomously act across the network for purposes of dynamic mapping, inspection, maintenance and, ultimately, repair. We will deliver novel algorithms for individual and swarm control in a variety of realistic pipe networks, thus providing the link between robotics control and mapping. Our overall aim will be twofold: (i) first to optimise the performance of the robot swarm, measured against specific end-user requirements and objectives; (ii) and second to maximise the long-term autonomy and longevity of the robots in the swarm. The first major challenge is to develop and test control algorithms for individual motor programmes (motor primitives) in individual robots operating in restricted-size pipe networks using realistic infrastructure, plurality of pipe types and robot hardware. The second challenge is to tackle autonomous decision making and long term autonomy in variable, sometimes hazardous environments, with limited physical, power, memory storage and computational resources. We will design the robot “brain” – a neural architecture for decision making that will provide sensory integration and sequential control of motor primitives. Our algorithms will be optimised to perform directed target finding, local search, mapping and sensing, hazard avoidance, battery charging and instrument placement. The swarm approach opens up a number of new challenges for direct and indirect robot collaboration. Thus, the third challenge is to deliver control algorithms for context-dependent aggregation, dispersal and physical collaboration within real pipe networks, building on protocols for distributed peer-to-peer and indirect (local or external hub-mediated) sensing and communication. All algorithms will be implemented in simulated environments before being tested on real robots in synthetic and real pipe networks.