Focus
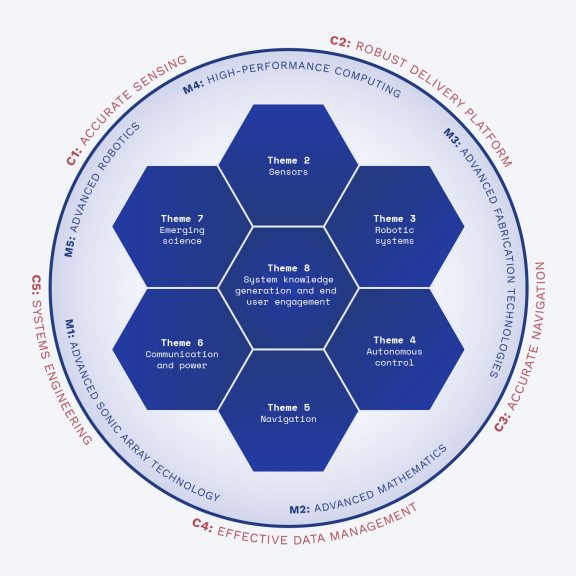
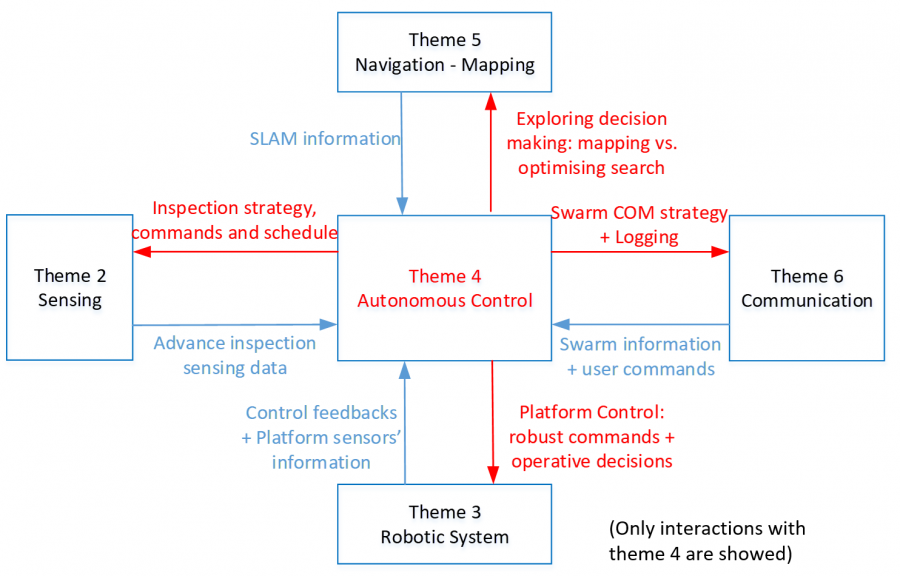
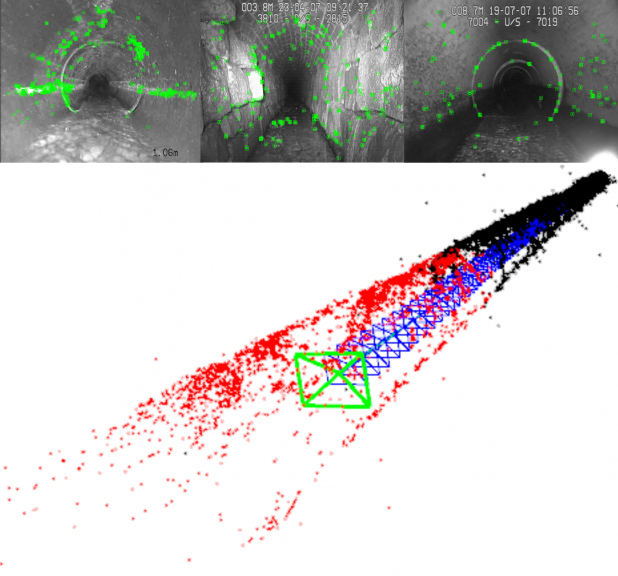
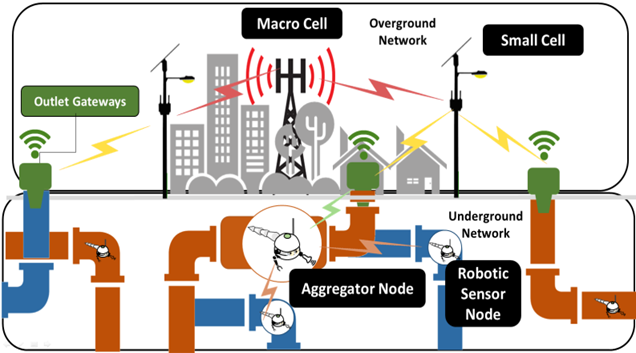
Theme 6 is to develop a new underground communication system (led by Robertson). Data from the sensors required for Themes 2, 5 and 6 will be fused and exploited in Themes 3 and 4 to ensure that the robot positions are known with a precision that enables accurate and quantifiable inspection coverage across the network by the robot swarm.
Challenges
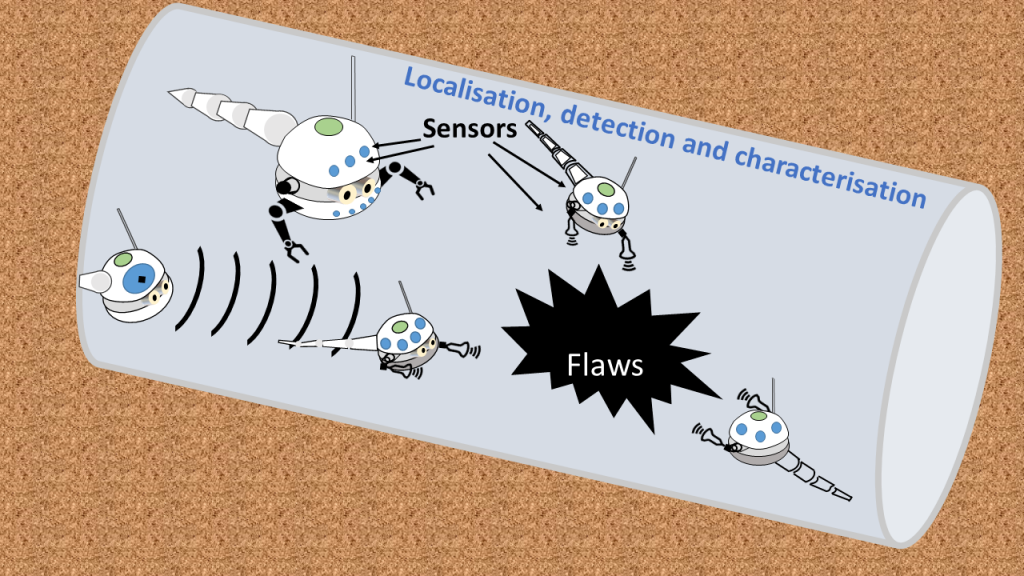
The pipe environment is exceptionally harsh but it is essential that we realise a tetherless solution so the autonomous robots are free to explore, inspect and map the complex network of buried pipes. The first major challenge is that the diverse pipe materials, diameters, contents, fill fluids and levels mean that there is no single communications approach that can work for pervasive robotics. The published research includes sonic, radio and optical communications but only deals with basic point-to-point physical links. The second major challenge is, therefore, that there is no understanding of how a wireless communication network can be used to enable many robots to work cooperatively in the pipe environment. This challenge requires an entirely new approach that exploits degrees-of-freedom in the network in order to meet the communication and localisation requirements of the proposed pervasive sensing system. The third major challenge is the need for wireless charging and energy harvesting to support operation of robots over an extended period of time. The team assembled is uniquely placed to address these challenges, with complimentary experience of wireless communication, RF and power electronics.