Focus
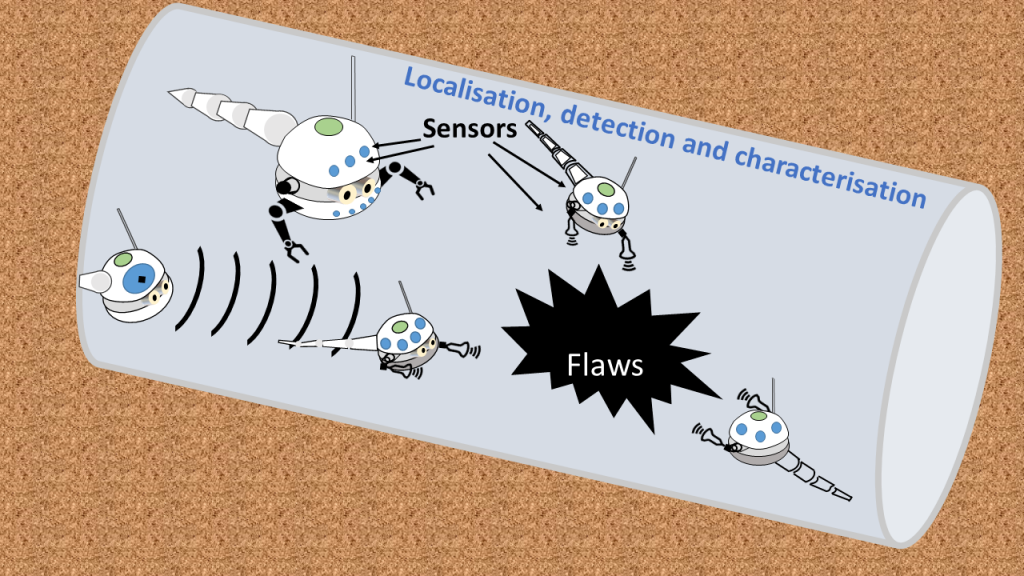
Theme 3 (led by Richardson) is focused on new miniature autonomous robots equipped with new sensors developed under Theme 2.
Challenges
The novel array sensing technology lies at the heart of this proposal, but the overall vision depends fundamentally on the ability to efficiently deliver sensors to known locations anywhere within the pipe network. Navigation, intelligence and communications are essential, but they are meaningless without a suitable physical embodiment. This theme will address the substantial challenges associated with the design and manufacture of robotic swarm hardware capable of long-term survival and reliable locomotion in buried pipes. There are a number of factors which make this theme difficult, and well beyond the capabilities of any current swarm robotic platforms: (i) a pipe network presents a challenging environment for robot locomotion (variable diameters, presence of various fluids, vertical sections, presence of complex features like valves); (ii) the environment is hostile (containing water, sewerage or gas, possibly at high pressures and/or flow rates), requiring high levels of environmental resistance; (iii) the small diameter of some pipes, combined with the need to avoid obstructing flow, requires extreme miniaturisation. Moreover, solutions to these challenges must be integrated, along with the necessary sensing, communication, navigation and energy-harvesting hardware. The team assembled is uniquely placed to address these challenges, with clear vision for the future of infrastructure robotics, relevant expertise in robotics, advanced manufacturing and robot locomotion mechanisms.