Focus
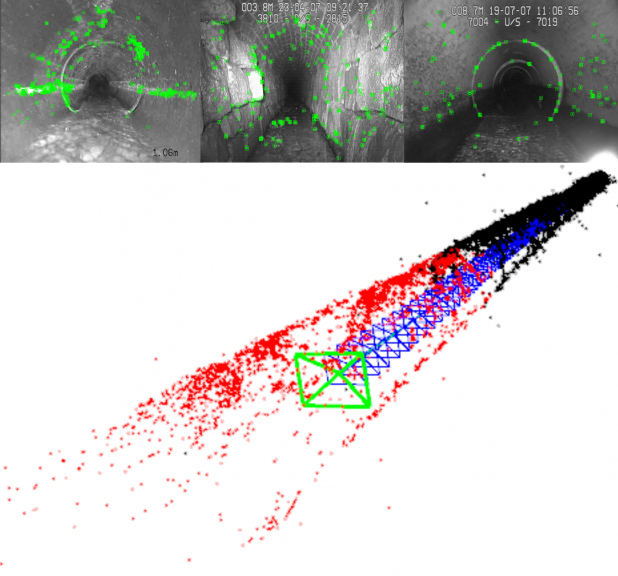
Theme 5 is about underground navigation (led by Anderson). This theme is crucial as the location of large sections of the buried pipe network is either poorly or totally unknown and there is no current off-the-shelf navigation system that can be used by robots to work autonomously underground. Therefore, Theme 5 is linking across Theme 2 – 4 and it is focused on advancing the science of simultaneous localisation and mapping (SLAM). This theme will result in a new mapping and navigation technology to be used by the inspection robots.
Challenges
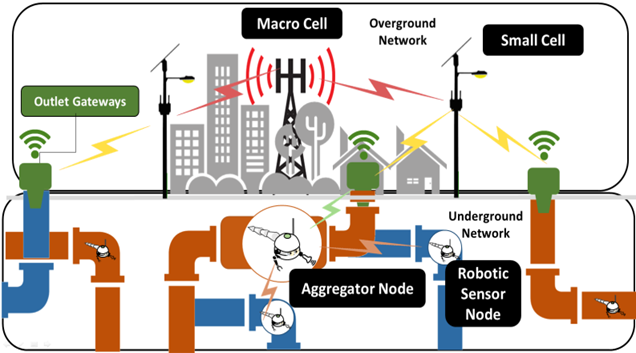
Effective interventions in buried pipes will rely on accurate knowledge of the pipe network itself and on the location of the robot sensors within the network. The former is for the operators to have accurate and up to date information on their assets. The latter is to ensure that the robot swarm efficiently inspects the whole network in a timely fashion and to pinpoint faults for interventions. It is also critical to the success of the array sensing that the sensor node positions are known accurately. This theme will focus on novel algorithms for simultaneous localisation and mapping (SLAM) and subsequent navigation in feature sparse pipe networks. The first major challenge is to generate accurate 3D maps of pipe networks using 1D and pseudo-2D movements in feature sparse environments. The second challenge is to incorporate prior knowledge (e.g. from geographical information systems (GIS)) to enhance SLAM initialisation and performance. The third major challenge is to combine SLAM information from multiple (swarm) robots to produce a real-time fused pipe network map and condition localisation information for robot navigation, sensing and for targeted interventions by utility companies. The team assembled is uniquely placed to address these challenges, with relevant expertise in SLAM, swarm robotics and autonomous systems including that acquired from the EPSRC ATU project (EP/K021699).