Focus
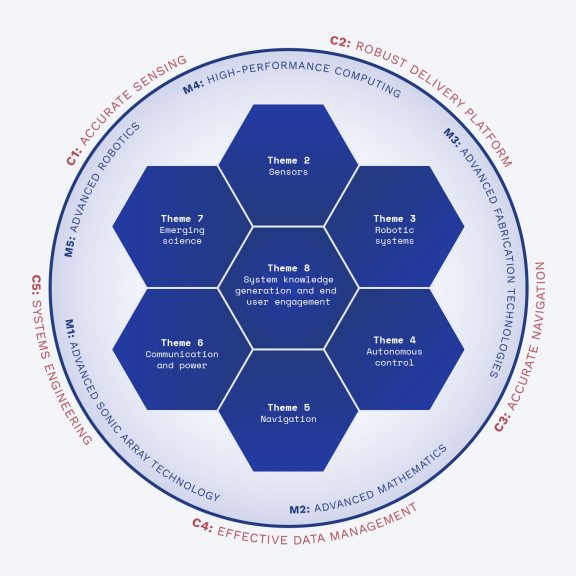
Theme T2 (sensors), led by Drinkwater and supported by Croxford is focused on the development of new imaging theory and practice for swarms of autonomous sensors in pipes with high operational uncertainties. T2 will inform the development of sensors and miniaturised electronics systems that will be integrated into the robots as a part of Theme 3 (led by Richardson).
Challenges
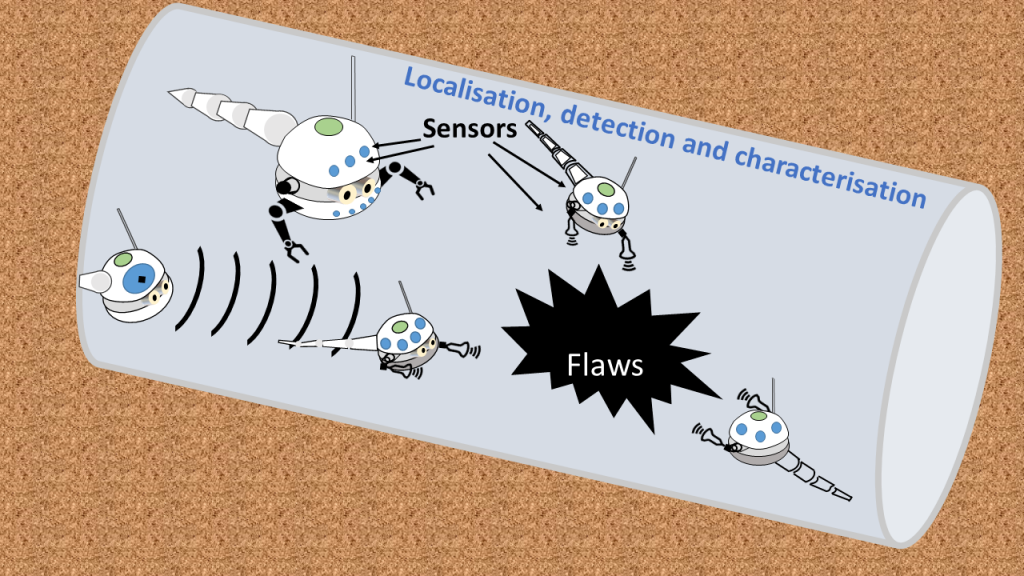
The pervasive robots developed in this PG will use sensors in a similar way to how humans use their senses to extract information from the world around them. The first major challenge is to extract accurate and relevant information, which in this case will relate to the current condition of the pipe. This requires the development of novel sonic/ultrasonic non-destructive systems that can accurately detect, locate and size defects and flow conditions in a variety of pressurised and partially filled pipes with a flow. The second challenge is to extract this information reliably, which involves developing statistical methods for minimising the effects of uncertainty in the measurements (e.g. position), such as data driven imaging. The third major challenge is in the development of the sensing and data analysis hardware which needs to be energy efficient and integrated with the other systems on-board the robots. The team assembled is uniquely placed to address these issues, with complimentary experience of probabilistic imaging and ultrasonic system design and integration that will result in an output much greater than the sum of its parts.